In a recent study published in the journal Polymers, researchers from Japan developed dielectric elastomer fiber actuators for soft robotics and tested them in a self-fabricated jellyfish-type robot.

Study: Dielectric Elastomer Fiber Actuators with Aqueous Electrode. Image Credit: Gorodenkoff/Shutterstock.com
Soft robots are built of flexible materials and have advantages of adaptability to the external environment, superior mechanical durability, and enhanced human safety. Soft robots are expected to find use in exploration and rescue, item handling, natural environments, and humanitarian aid for rehabilitation.
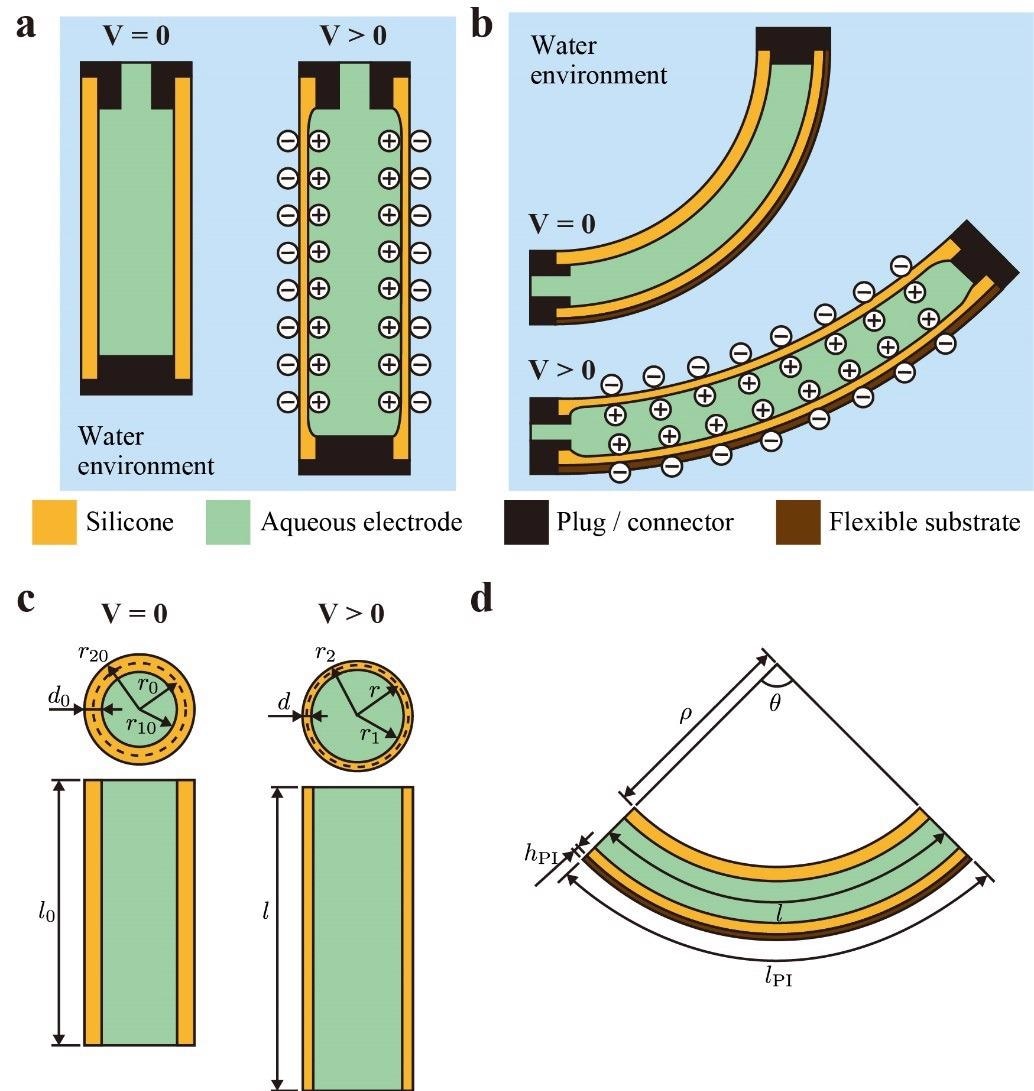
Working principle of (a) linear-type dielectric elastomer fiber actuators (DEFAs) and (b) bending-type DEFAs. (c) Schematics of linear-type DEFAs for modeling. (d) Schematics of bending- type DEFAs for modeling. Image Credit: Shimizu, K et al., Polymers
Dielectric elastomer actuators (DEAs) are ideal for soft robotics, as they have an elastomer membrane placed between two electrodes in which, after application of high voltage, the negative electric charges attract each other, compressing the membrane in the thickness direction and increasing it in the planar direction. DEAs have excellent electromechanical efficiency, quick reaction times, and high actuation stresses. Fiber-shaped DEA is used in soft robotic systems to construct exoskeletons and simulate biological muscles and delicate grippers.
In the study, researchers developed dielectric elastomer fiber actuators (DEFAs) for application in soft robotics. The actuator is made out of a silicone tube containing an aqueous electrode (sodium chloride solution) and surrounded by water, which serves as the ground electrode. Additionally, an analytical model of DEFAs (linear and bending actuation) was developed, and a jellyfish-type underwater robot was fabricated. The jellyfish-type robot was also tested in a water environment to establish the utility of DEFAs for soft robotics.
Methodology
The silicon tube was fabricated using a basic polymer ratio of 1:1 and the crosslinking agent to base ratio of 1:10. The mixture developed was injected into a mold composed of a brass cylinder, sealing tape, and an acrylonitrile butadiene styrene (ABS) pipe using a syringe.
To assure the removal of the cured silicone tube, a release agent was sprayed on the brass cylinder prior to the fabrication process of assembling the mold. The silicone mixture was then cured in an oven, and after removing the sealing tape, a small amount of ethanol was sprayed into the space between the outer and inner mold to remove the inner mold (brass cylinder) without damaging the silicone. Following the removal of the inner mold, the silicone tube was gently removed from the interior of the outer mold and cleaned with ethanol to remove any residual release agent from the surface. Every manufactured tube was air compressed using a syringe to ensure no defects such as uneven thickness or perforations.
The fabrication of linear-type DEFAs was accomplished by cutting a silicone tube at a length of 100 mm. After that, a sealing plug was applied to one end, and a connection was added to the other. Using a sealant, both connections were attached to the silicone tube. The sealing plug was created using computer-aided design software and manufactured on a 3D printer.
The jellyfish-like robot was built out of four bending-type DEFAs made of a silicone tube, and to modify the initial bending angle, actuators were employed (125 m-thick, three mm-wide polyimide film and constant pre-stretch ratio of 1.3).
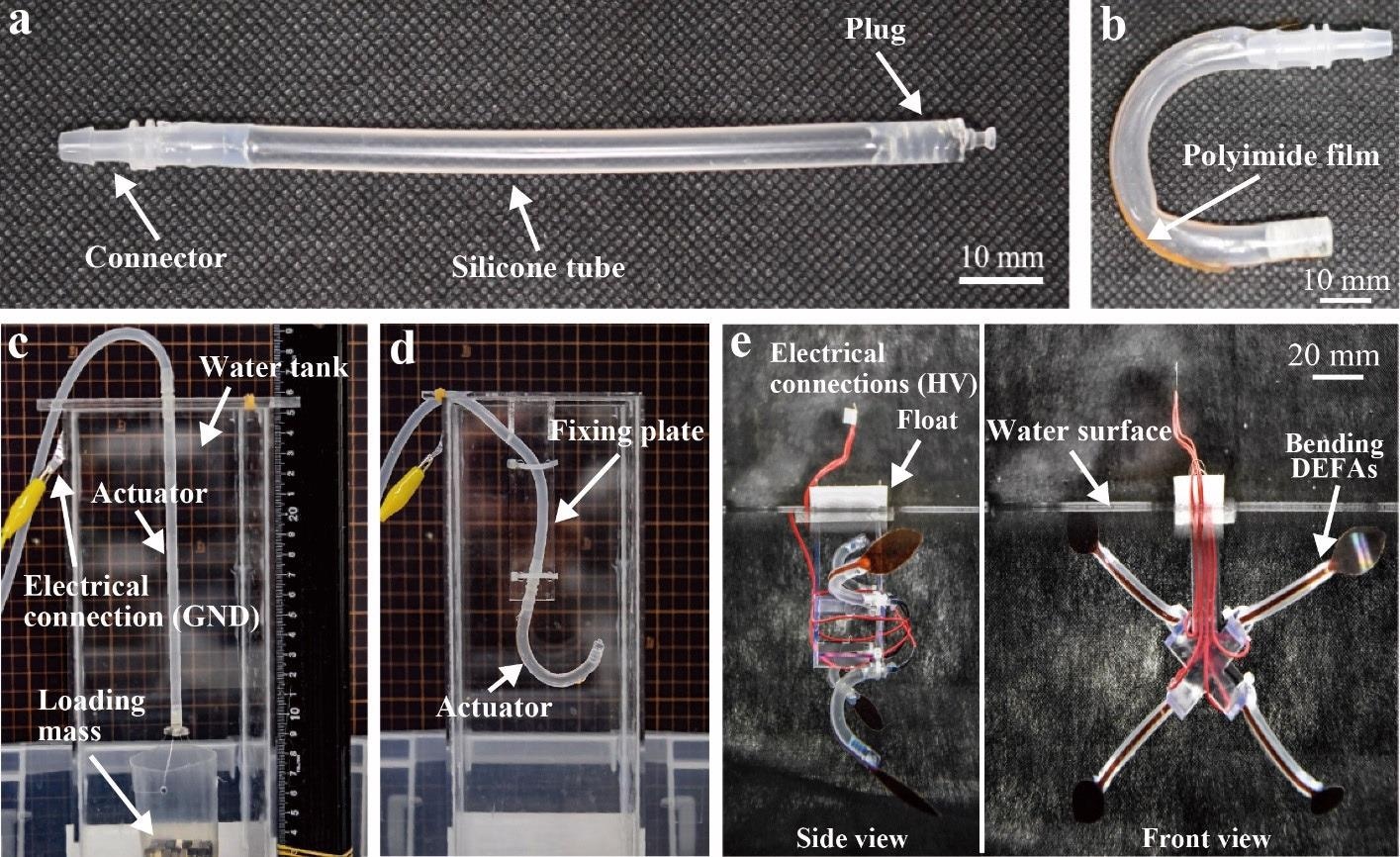
(a) Fabricated linear-type DEFA (without aqueous electrode). (b) Fabricated bending-type DEFA (without aqueous electrode). (c) Experimental setup to characterize linear-type DEFA and (d) bending-type DEFA. (e) Jellyfish-type underwater robot using four bending-type DEFAs. Image Credit: Shimizu, K et al., Polymers
Results
The voltage-controllable elongation of the linear-type DEFA revealed that actuation strain increased with increasing voltage, and this trend was consistent across all loading situations. Voltage-controllable angular displacement was reported for the bending-type DEFA, with experimental results demonstrating quadratic growth. The linear-type DEFA's actuation strain (1.3% at 20 V/µm) is equivalent to or better than similar products described in the literature. When applying greater voltage below the breakdown strength of the silicone elastomers employed in the actuator, a significant actuation strain is expected for DEFAs.
The swimming speed for jellyfish-type robots was measured at 3.1 mm/s under the testing conditions (10 kV and 4 Hz), equivalent to or more than that reported for other jellyfish-type robots in the literature (1.5 mm/s at 3 kV and 2 Hz). Furthermore, the body length (BL)/s is employed by biomimetic underwater robots to normalize their swimming pace. The results of the jelly-fish type robot demonstrate the application of DEFA in soft robotics.
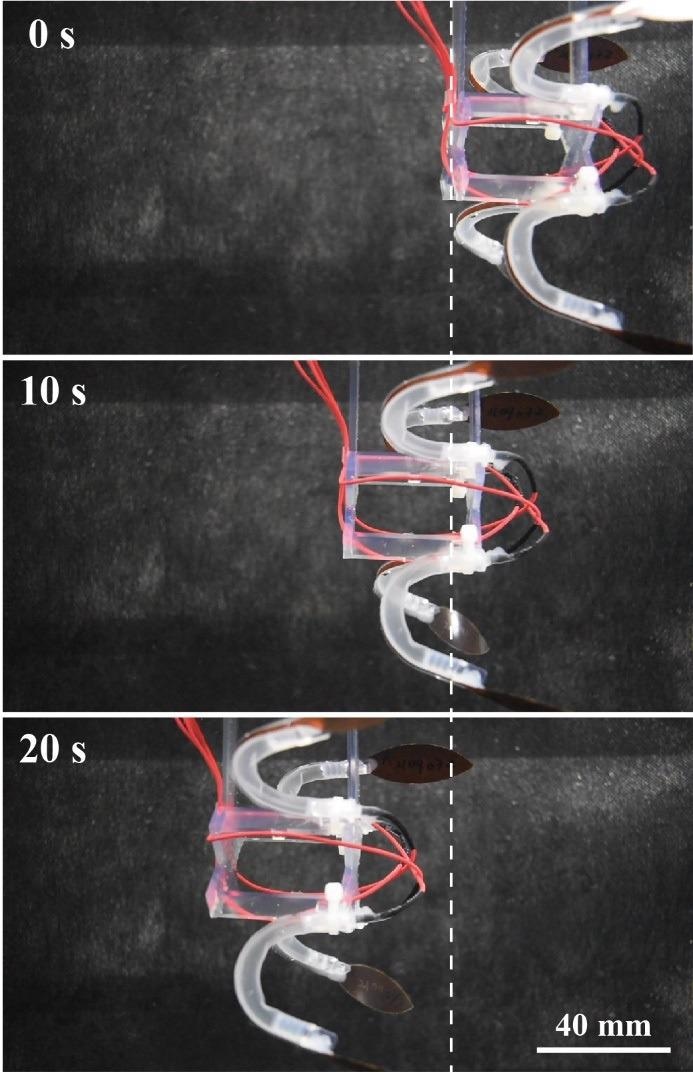
Swimming sequence of the jellyfish-type underwater robot driven at 10 kV and 4 Hz. Image Credit: Shimizu, K et al., Polymers
Conclusions
The researchers developed dielectric elastomer fiber actuators (DEFAs) that operate in a water environment and an aqueous electrode. The reported actuation strain is equivalent/improved to other DEAs of a similar type. The analytical model accurately predicts the actuator's behavior but the disparity in the experimental results was also observed.
Future research may concentrate on the improved characterization of the actuation features of DEFAs and investigation of material combinations for the silicone tube and the substrate to improve performance. Understanding the manufacturing process's limitations based on possible device size can provide insights into actuation performance.
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.
Sources:
Shimizu, K.; Nagai, T.; Shintake, J. Dielectric Elastomer Fiber Actuators with Aqueous Electrode. Polymers 2021, 13, 4310.
https://www.mdpi.com/2073-4360/13/24/4310