Writing in the journal Polymers, a team of scientists from China has designed a novel module for soft robot applications which incorporates supercoiled polymer artificial muscle strings. In the study, soft robots have been constructed based on the module, laying the groundwork for future research.
Study: A Proprioceptive Soft Robot Module Based on Supercoiled Polymer Artificial Muscle Strings. Image Credit: Yurchanka Siarhei/Shutterstock.com
Soft Robots
Animals use soft tissues such as muscles to provide locomotion and other vital functions. The mechanical properties of soft tissues allow animals to store energy, cushion impacts, and adapt to their environments.
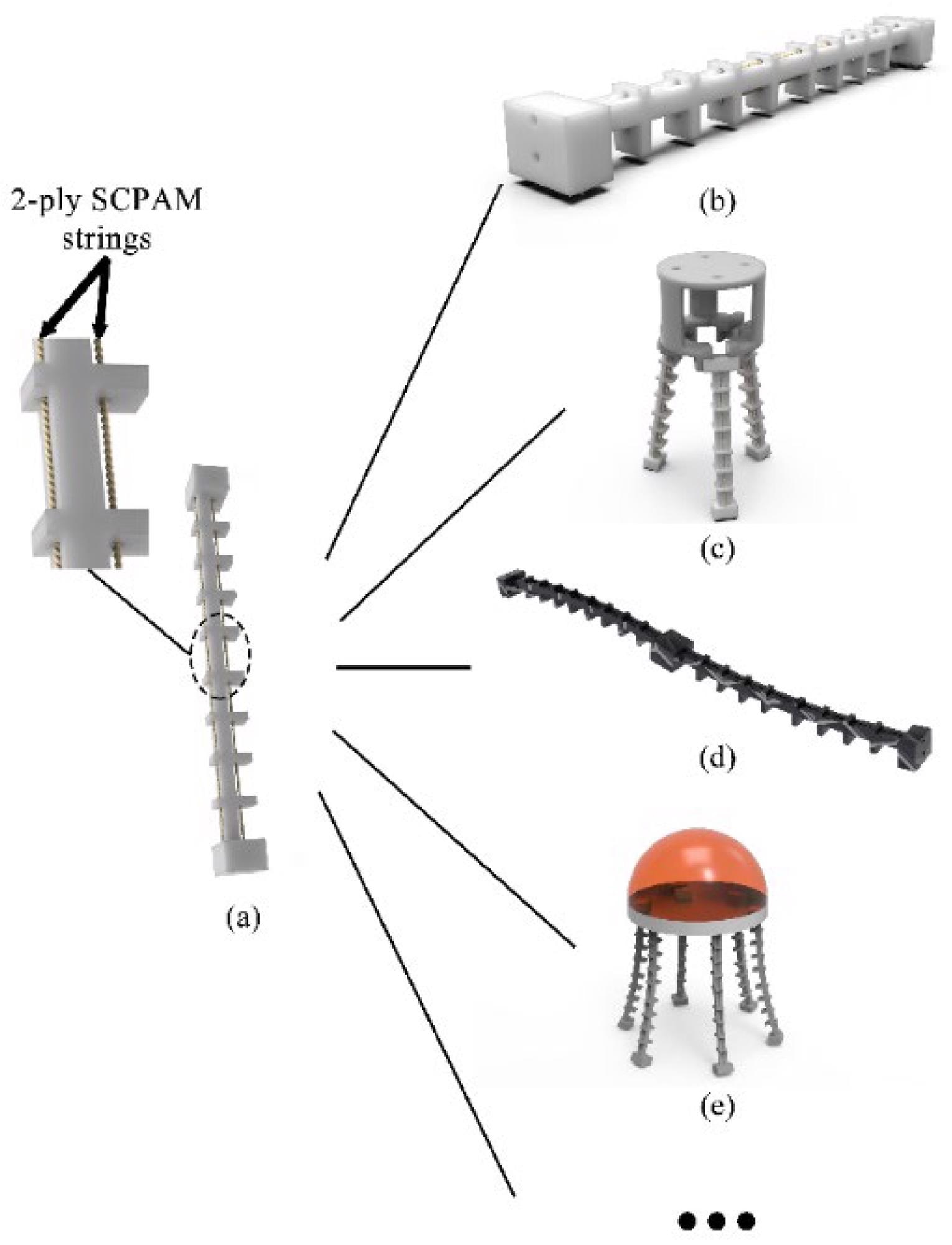
A single soft robot module and soft robots configured by the modules. (a) A single soft robot module, and chambers to configure the actuator and sensor. (b) An inchworm-inspired crawling robot. (c) A soft robotic gripper. (d) A snake-like manipulator. (e) A jellyfish-inspired robot with underwater swimming capability. Image Credit: Yang, Y et al., Polymers
In recent decades, many soft robots have been designed that mimic animals and achieve bionic motion. Incorporating biomimicking soft artificial components allows these robots to adapt to unstructured environments and give them enhanced flexibility and conformability. Numerous applications have been explored in recent research for these advanced robots.
Soft robots take advantage of different actuation methods with varying materials and technologies, including pneumatic actuators, shape memory alloys, artificial tendons, shape memory polymers, liquid crystal actuators, and ionic polymer-metal composites.
Modularity in Soft Robots
A recent trend in soft robotics has been the use of modules to construct general adaptive soft robots with different functions, depending on their requirements. Different actuation methods can be used in modular soft robots, with each method possessing its own benefits and drawbacks.
For instance, pneumatic actuators are soft and possess biocompatibility, but they commonly require cumbersome accessories such as air compressors, limiting their applications in self-contained soft robot systems. Shape memory polymer actuators possess biocompatibility, high strain recovery, and biodegradability but they suffer from long response times.
Liquid crystal actuators possess superior mechanical properties and anisotropic behaviors, but processing technologies for these actuators are still in their infancy. Soft metal alloys have high power densities, low operating voltages, and high reversibility, but because they are not soft materials, hysteresis occurs during phase transformation.
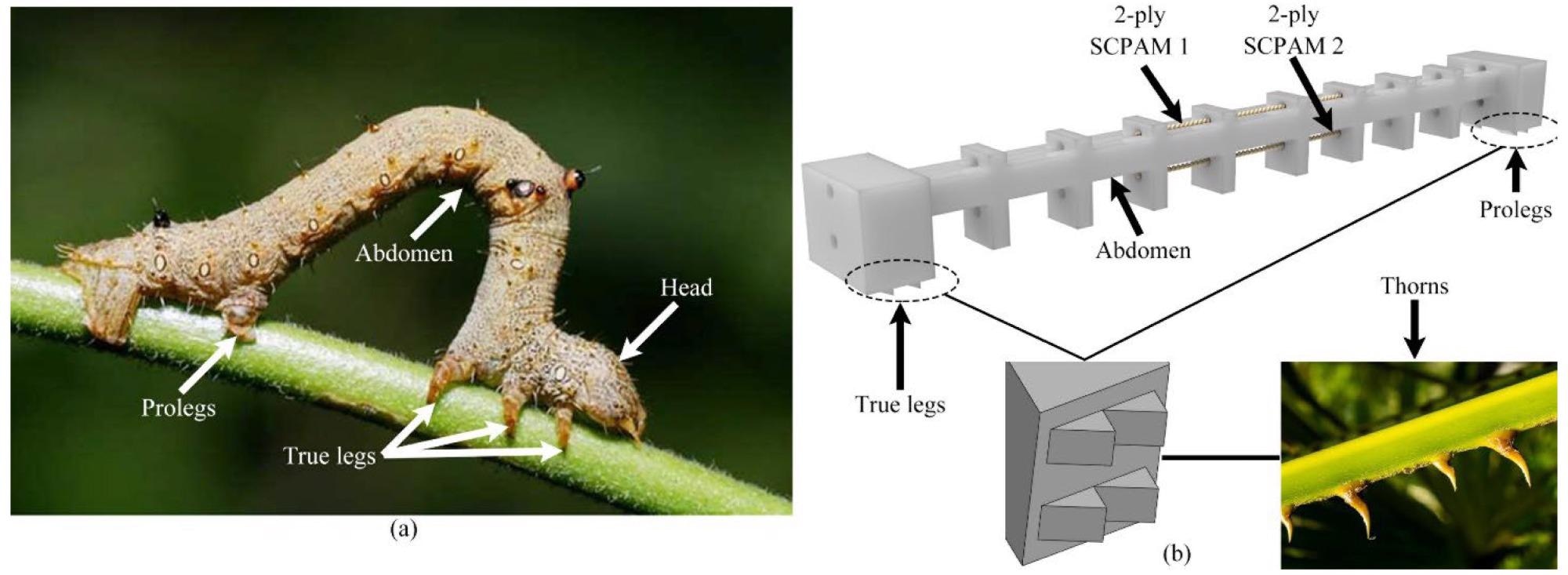
The inspiration for the design of the crawling robot. (a) A crawling inchworm and its tissues. (b) Soft crawling robot model and inspiration source of robot’s leg design. Image Credit: Yang, Y et al., Polymers
Selecting the right type of actuator is a key factor governing the performance of systems. Several types of soft robots, including grippers, manipulators, swimmers, and crawlers, have been developed in recent years taking advantage of several types of actuator modules.
Supercoiled Polymer Artificial Muscles
Supercoiled polymer artificial muscles are a recently proposed actuation method for modules used in soft robots. These artificial muscles are constructed by constantly twisting polymer threads or fibers and present a novel solution to soft robot design that overcomes issues with other methods of actuation.
These artificial muscles have found application in soft robots, including swimming, crawling, and grasping. Additionally, multifunctional modules have been designed which take advantage of supercoiled polymer artificial muscles. Scientists have recently reported the use of these artificial muscles as internal strain sensors.
Whilst several studies have researched the capabilities of these artificial muscles as either actuators or sensors, there has been a lack of research on integrated actuating-sensing systems using supercoiled polymer artificial muscles.
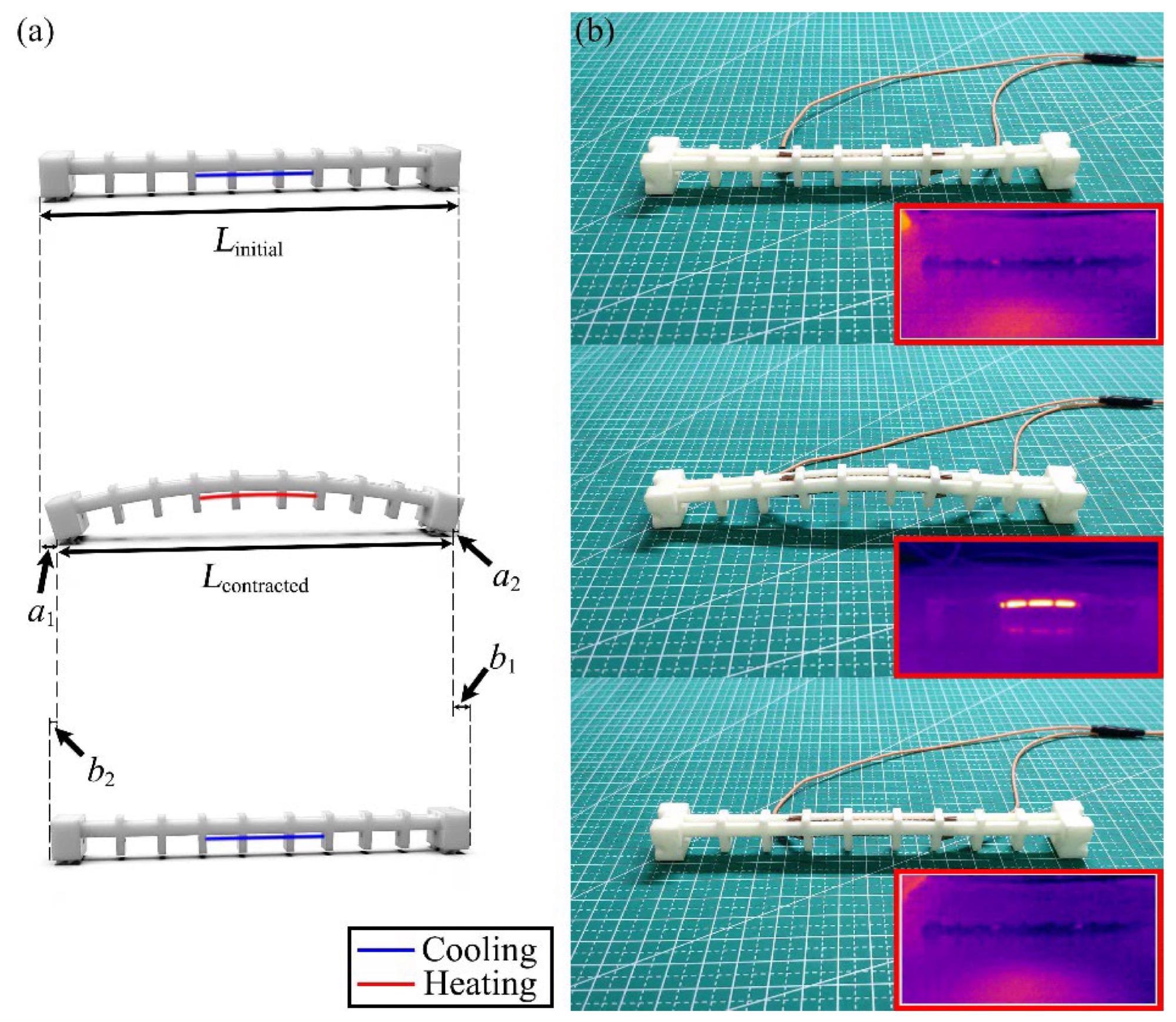
Locomotion efficiency analysis of the crawling robot. (a) Schematic diagram during one locomotion cycle of the crawling robot. The robot moves forward a short distance, accompanied by a slide. (b) The actual locomotion cycle and infrared thermograms during the locomotion of the crawling robot. Image Credit: Yang, Y et al., Polymers
The Study
The authors have proposed a module that incorporates supercoiled polymer artificial muscle strings. The proposed module possesses proprioceptive sensing capabilities and incorporates an actuation-sensing function. Bidirectional actuation capacities give this module the ability to bend in two opposite directions. An internal soft strain sensor is employed to infer the robot’s bending deformation.
Prototype soft robots were constructed in the research which incorporate 2-ply supercoiled polymer artificial muscle strings. The team built a robotic gripper and a crawler using the module as a basic unit, and based on observations of their performance the authors envisioned other robots such as jellyfish-inspired swimmers.
The proposed device in the study can be used in a sensing or actuating role, depending on the task need. This function can be adaptively altered to achieve the desired result, making it a dynamic module.
The crawler was inspired by inchworms and thorny plants, with a thorny structure on one end providing the necessary anisotropic friction mechanism to allow locomotion. The locomotion rate and efficiency of this robot were evaluated in the research. The gripper was evaluated on a variety of objects to assess its sensing and grasping capabilities. Using the gripper on different objects produced distinct resistance-time curves.
Future Study
Based on the promising results observed in this study, the authors have proposed further work to evaluate the performance and real-world applications of soft robots incorporating supercoiled polymer artificial muscle modules. More soft robots utilizing the proposed module will be developed by the authors in future studies.
One proposed area of research that the authors will be covering in the future is adding a variable stiffness function to the gripper to allow it to grasp a wider range of objects. Additionally, future studies will incorporate tunable stiffness in the module and increase the module’s output force. Theoretical modeling will be employed to investigate interactions between actuators and soft robot bodies.
Further Reading
Yang, Y et al. (2022) A Proprioceptive Soft Robot Module Based on Supercoiled Polymer Artificial Muscle Strings Polymers 14(11) 2265 [online] mdpi.com. Available at: https://www.mdpi.com/2073-4360/14/11/2265
Disclaimer: The views expressed here are those of the author expressed in their private capacity and do not necessarily represent the views of AZoM.com Limited T/A AZoNetwork the owner and operator of this website. This disclaimer forms part of the Terms and conditions of use of this website.