Jan 4 2021
A persistent challenge across the science and engineering fields is estimating how and when groups of robots, animals, or particles become orderly.
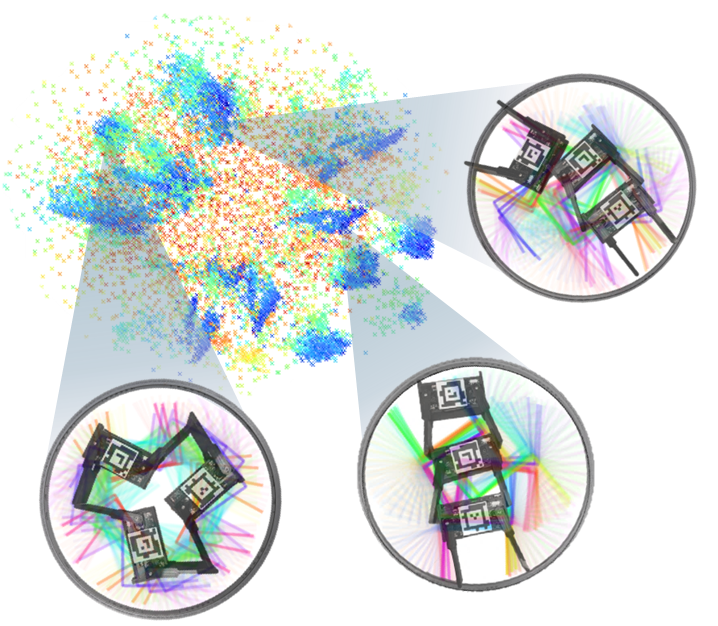 The flower-like set of points represents all possible shapes that the smarticle swarm can take on. In line with rattling theory, the most common shapes are also the most orderly with the lowest rattling (shown in blue). Image Credit: Thomas A. Berrueta.
The flower-like set of points represents all possible shapes that the smarticle swarm can take on. In line with rattling theory, the most common shapes are also the most orderly with the lowest rattling (shown in blue). Image Credit: Thomas A. Berrueta.
The discipline of statistical mechanics, developed by engineers and scientists in the 19th century, estimates how groups of simple particles change from order to disorder states, as when a group of arbitrarily colliding atoms freezes to create an even crystal lattice.
Scientists also find it more difficult to predict the overall behaviors that can be obtained when the particles turn out to be more complex, such that they are capable of moving under their own power. A system like this—seen in robot swarms, bacterial colonies, and bird flocks—is referred to as “active matter.”
A group of engineers and physicists have suggested a novel principle through which active matter systems can order spontaneously, without requiring any higher-level instructions or even a programmed communication among the agents. The team has shown this new principle in a wide range of systems, such as collections of periodically shape-changing robots, known as “smarticles”—that is, smart, active particles.
The study was published in the January 1, 2021 issue of the journal Science.
Pavel Chvykov, a Postdoctoral Researcher from the Massachusetts Institute of Technology, had developed the theory while he was a student of Professor Jeremy England, who is currently a researcher in the School of Physics at Georgia Institute of Technology. According to this theory, specific kinds of active matter with adequately messy dynamics will spontaneously detect the so-called “low rattling” states.
Rattling is when matter takes energy flowing into it and turns it into random motion. Rattling can be greater either when the motion is more violent, or more random. Conversely, low rattling is either very slight or highly organized—or both.
Jeremy England, Professor and Researcher, School of Physics, Georgia Institute of Technology
“So, the idea is that if your matter and energy source allow for the possibility of a low rattling state, the system will randomly rearrange until it finds that state and then gets stuck there. If you supply energy through forces with a particular pattern, this means the selected state will discover a way for the matter to move that finely matches that pattern,” added England.
To design their theory, both England and Chvykov took a cue from a phenomenon, called thermophoresis, which was identified by the Swiss physicist Charles Soret back in the late 19th century.
During experiments, Soret observed that when a preliminary uniform salt solution in a tube is subjected to a temperature variation, the salt concentration in the colder region would increase spontaneously. This increase in salt concentration corresponds to an increase in the order of the solution.
Both Chvykov and England then designed various mathematical models to show the low rattling principle, but the duo was able to test the predictions only when they met Daniel Goldman, the Dunn Family Professor of Physics from the Georgia Institute of Technology.
A few years back, I saw England give a seminar and thought that some of our smarticle robots might prove valuable to test this theory.
Daniel Goldman, Dunn Family Professor of Physics, Georgia Institute of Technology
In association with Chvykov, who visited Goldman’s laboratory, PhD students William Savoie and Akash Vardhan utilized the three flapping smarticles encased in a ring to compare between the theory and experiments.
Savoie and Vardhan noted that rather than exhibiting complex dynamics and investigating the container fully, the robots would unexpectedly self-organize into a few dances—for instance, one dance involves three robots that slap one another’s arms in a sequential manner. Such dances could last for hundreds of flaps, but they abruptly lose stability and are substituted by a dance of a varied pattern.
After the initial demonstration that such uncomplicated dances were undoubtedly low rattling states, Chvykov teamed up with engineers from Northwestern University—Professor Todd Murphey and PhD student Thomas Berrueta—who designed better and more refined controlled smarticles.
The enhanced smarticles enabled the team to test the limitation of the theory, for example, how the number and types of dances differed for different arm flapping patterns, and how such dances can possibly be regulated.
“By controlling sequences of low rattling states, we were able to make the system reach configurations that do useful work,” stated Berrueta.
According to the researchers from Northwestern University, these latest findings may hold wide practical implications for metamaterials, active matter, and micro-robotic swarms.
For robot swarms, it’s about getting many adaptive and smart group behaviors that you can design to be realized in a single swarm, even though the individual robots are relatively cheap and computationally simple. For living cells and novel materials, it might be about understanding what the ‘swarm’ of atoms or proteins can get you, as far as new material or computational properties.
Jeremy England, Professor and Researcher, School of Physics, Georgia Institute of Technology
The Georgia Tech-based team, who participated in the study, includes Jeremy L. England, a Physics of Living Systems scientist who conducts studies with the School of Physics; Dunn Family Professor Daniel Goldman; Professor Kurt Wiesenfeld; and graduate students Akash Vardhan (Quantitative Biosciences) and William Savoie (School of Physics).
The researchers joined Pavel Chvykov from the Massachusetts Institute of Technology, together with professor Todd D. Murphey and graduate students Thomas A. Berrueta and Alexander Samland from Northwestern University.
The new study is based on research work funded by the Army Research Office under awards from ARO W911NF-18-1-0101, ARO MURI Award W911NF-19-1-0233, ARO W911NF-13-1-0347, by the National Science Foundation under grants PoLS-0957659, PHY-1205878, PHY-1205878, PHY-1205878, and DMR-1551095, NSF CBET-1637764, by the James S. McDonnell Foundation Scholar Grant 220020476, and the Georgia Institute of Technology Dunn Family Professorship.
Journal Reference:
Chvykov, P., et al. (2021) Low rattling: A predictive principle for self-organization in active collectives. Science. https://doi.org/10.1126/science.abc6182.